Beacon alapú helymeghatározás: A radaros navigáció kihasználhatja a passzív radarjelzők hálózatát, amelyek stratégiailag vannak elhelyezve a helyszínen.
Cél nélküli helyzetreferencia-rendszerek (dinamikus helymeghatározás): Lehetővé teszi a dinamikus pozicionáló rendszer pontos pozicionálását konkrét célpontok nélkül.
GPS-tiltott navigáció a földalatti bányászatban: Mivel a radar erős porban is működik, a radar segítségével centiméteres helymeghatározás végezhető a terület radartérképéhez viszonyítva.
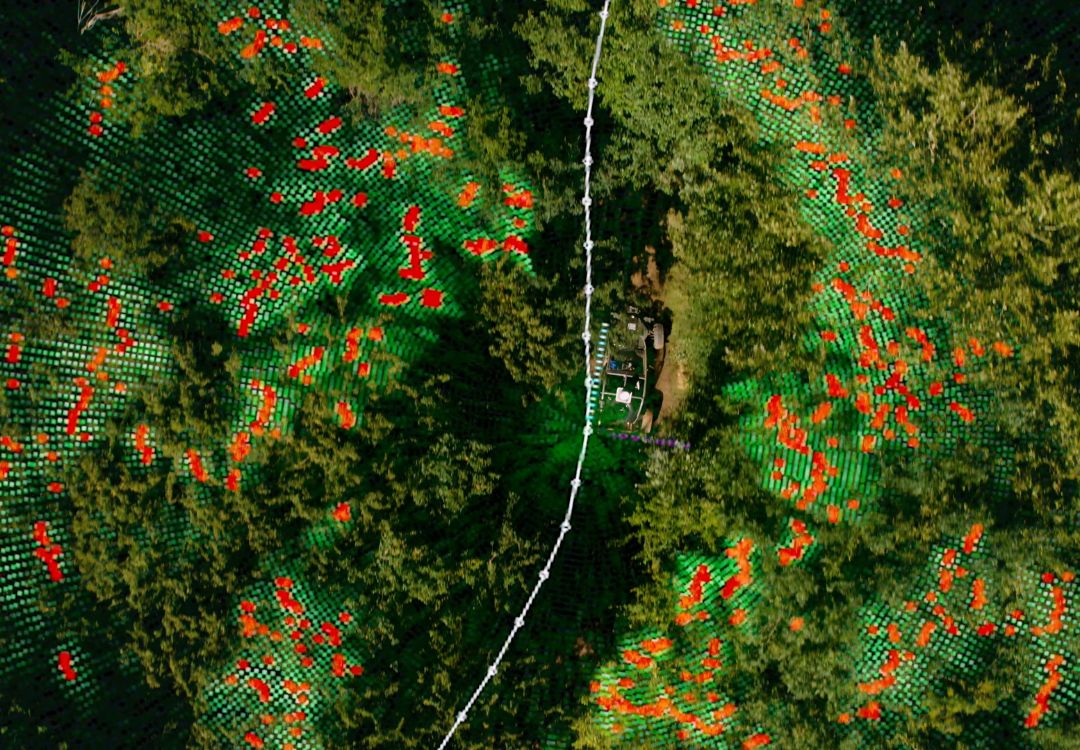
GPS-korlátozott navigáció az erdészetben: A radaros navigáció a GNSS-RTK-korrigált rendszer kiegészítésére használható, ha a GPS nem működik, például egy lombkorona alatt.
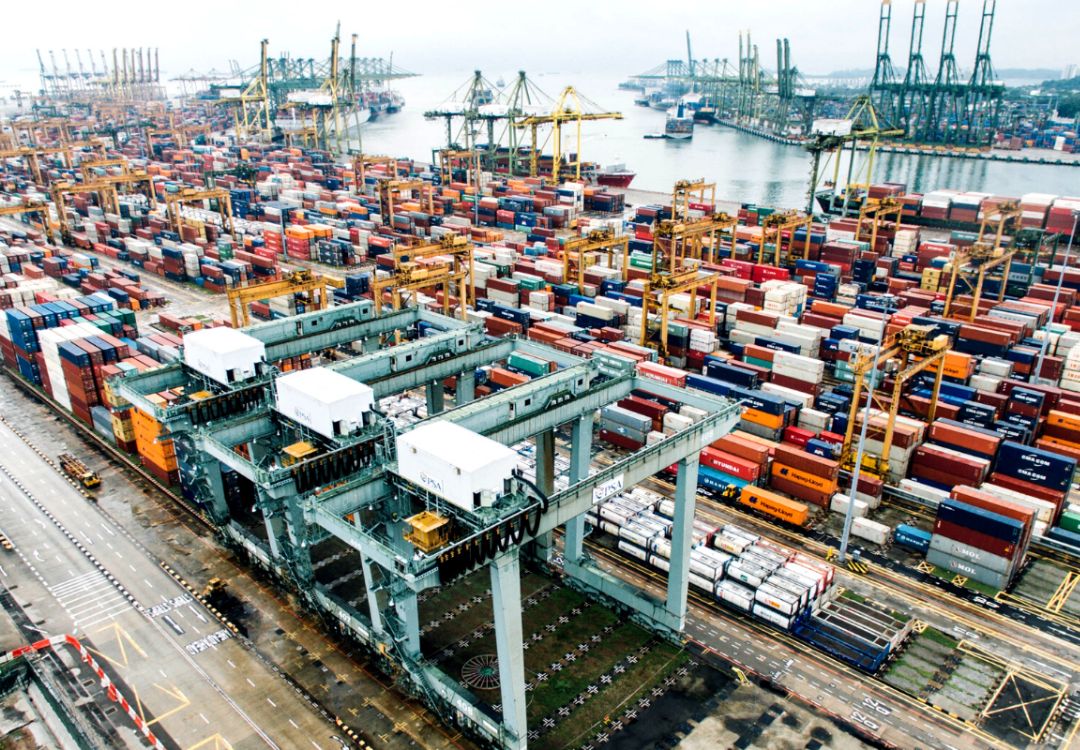
Radar/GPS/IMU fúzió a robusztus tengeri navigációhoz (partközeli, part menti kompok és kotróhajók ): A radar INS + GPS rendszerekkel egyesíthető, hogy korlátozza a rendszer sodródását, ha a GPS nem áll rendelkezésre. A radar hatótávolsága és robusztussága ideálissá teszi a tengeri rendszerekben.
Radaralapú odometria, lokalizáció, SLAM kutatás: A RAS érzékelőcsaládot világszerte használják a robotikai kutatók, több egyetem dolgozik a radarral, és több mint 300 tanulmányt írtak az érzékelőink felhasználásával.
Automatikus dokkolás tengeri használatra: A nagyobb hajók robusztus pozicionálása a zsúfolt vizeken a vezérlőrendszerbe való betáplálás módjai, ahol a robusztusság és a pontos pozicionálás létfontosságú.