Radar alapú helymeghatározás – BAE rendszerekkel – Temze, London, Egyesült Királyság (2021)
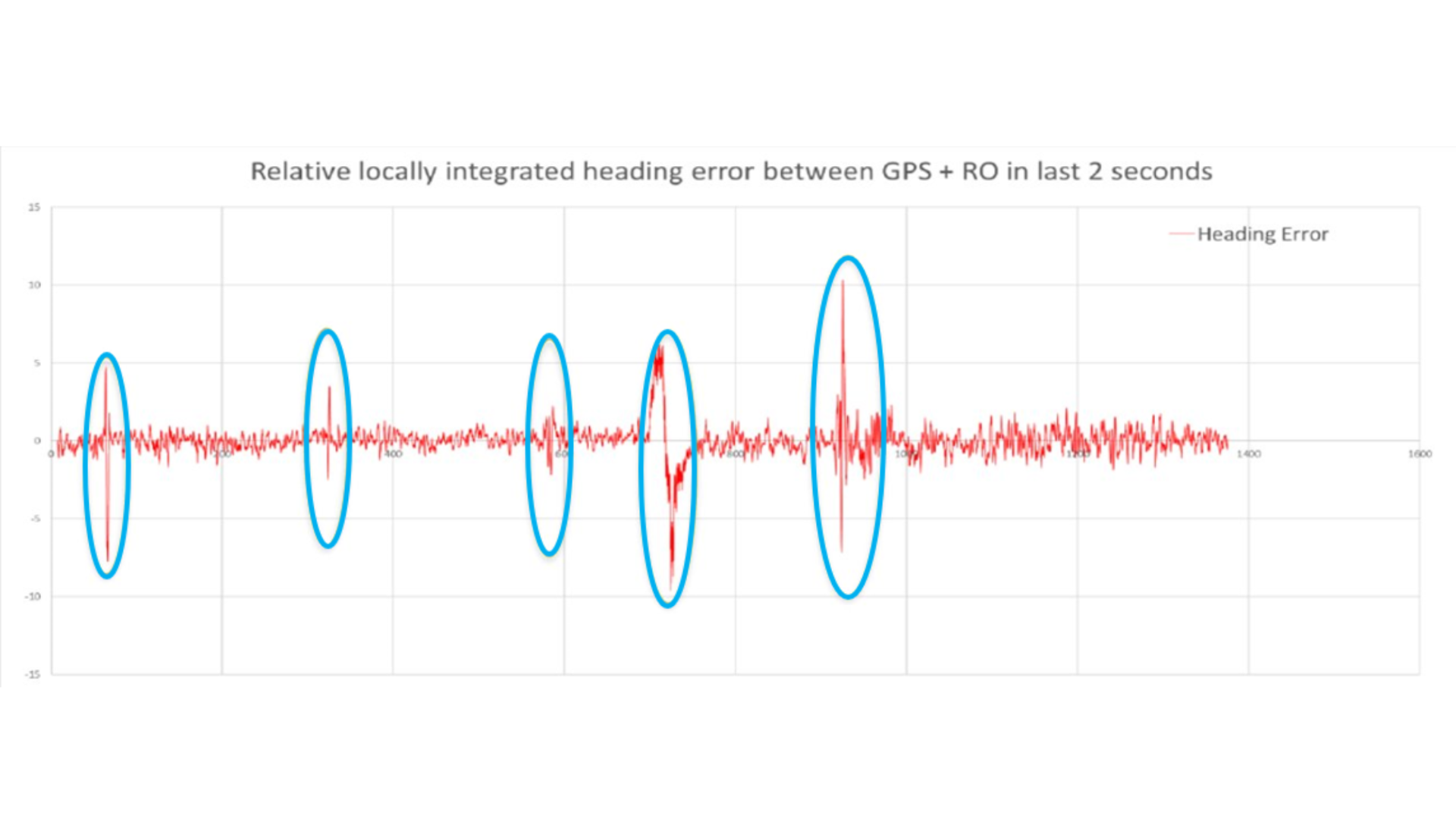
BAE és Navtech Radar együttműködtek a lokalizáció kipróbálásában, a BAE adatgyűjtő hajójáról a Temze egy szakaszán gyűjtött adatok felhasználásával. A rendszer teljesítményét a fedélzeti GNSS-sel és korrekciókkal hasonlították össze, és különös figyelmet fordítottak azokra a területekre, ahol a GNSS nem működik, például hidak alatt és éles kanyarokban.
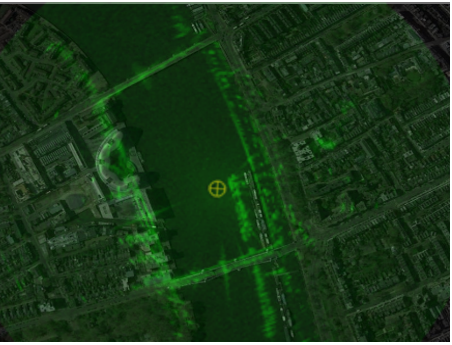
A BAE Systems a Temze 25,8 mérföldes szakaszát választotta próbahelyszínnek; Ez 18 hidat és két éles kanyart tartalmazott. Az útvonal egyik teljes áthaladását a környezet térképének elkészítése érdekében végezték, majd egy másodikat végeztek el a lokalizáció érdekében.
A radaros megoldás körülbelül 10 MB/km helyet használ a térképek létrehozásához, így a teljes Temze feltérképezéséhez kevesebb mint 3,5 GB tárhelyre lenne szükség. A kísérlet eredményei azt mutatták, hogy a megoldás sikeres lokalizációt biztosított, átlagosan 10,3 cm-es pontossággal az egész út során. Az érzékelő az út teljes hosszában lokalizált, beleértve az olyan területeket is, amelyek jellemzően kihívást jelentenek az érzékelőalapú lokalizációs technikák számára.
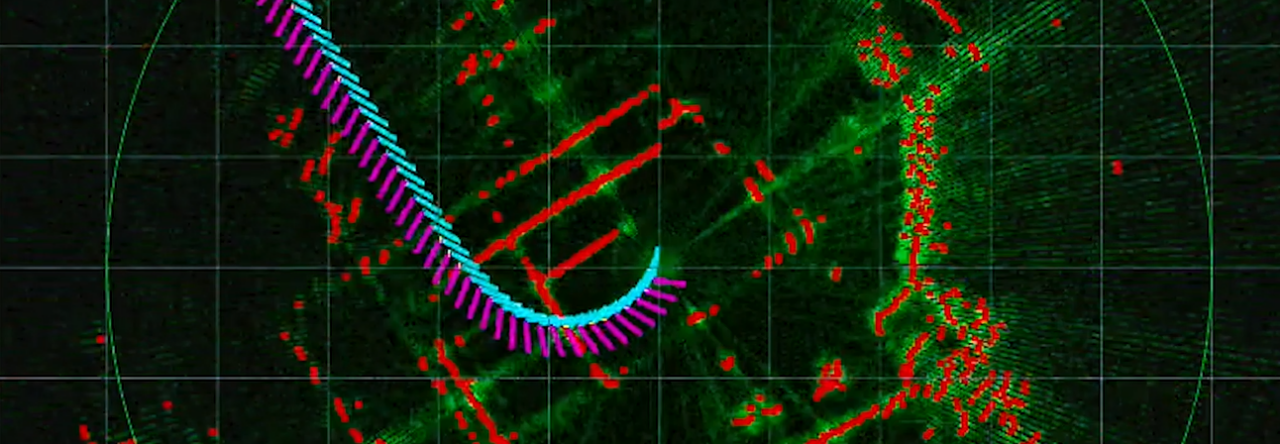
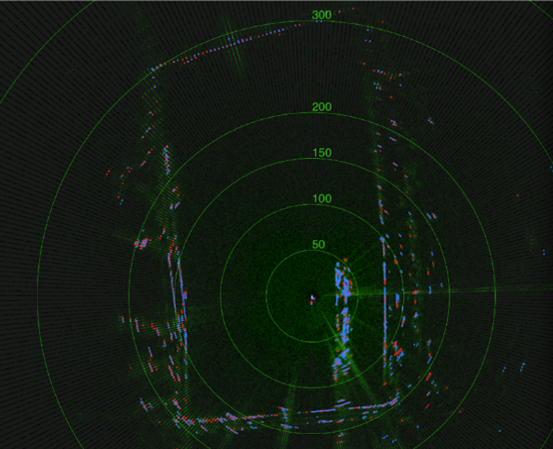
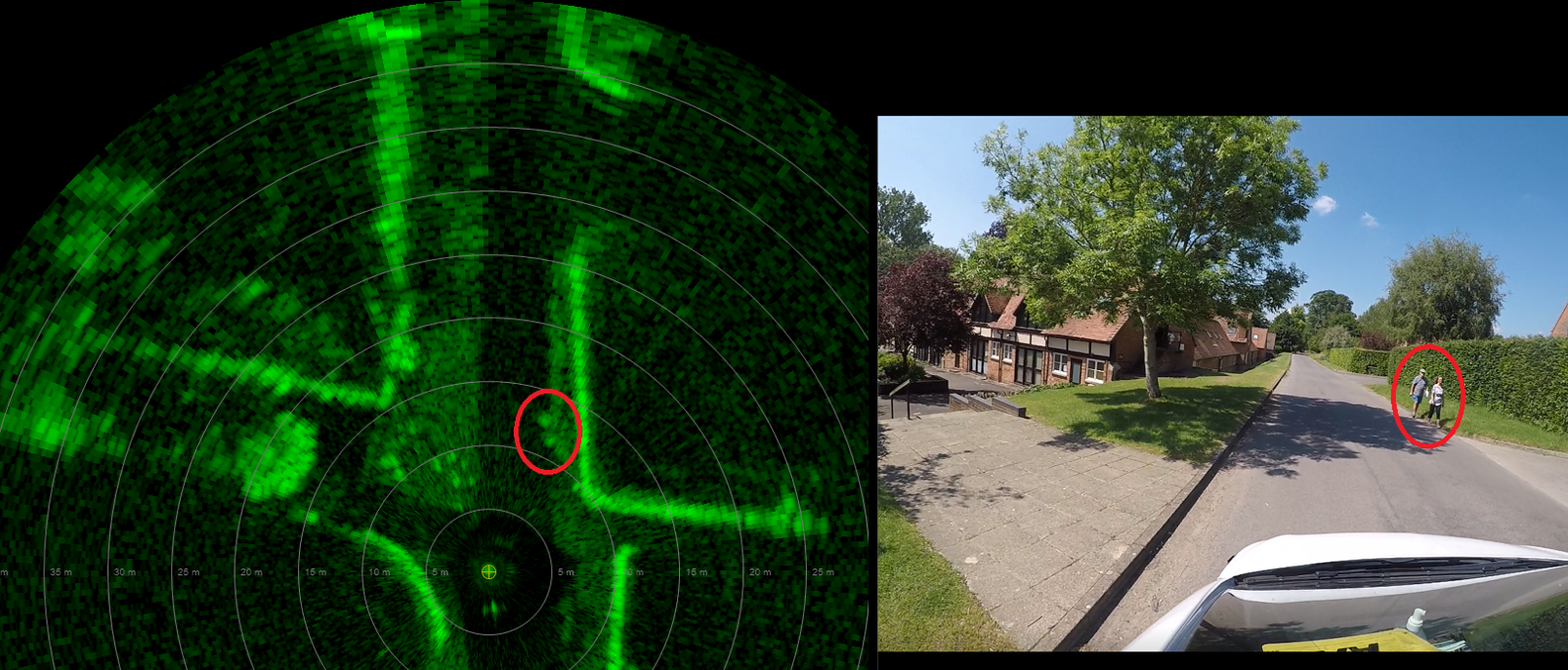
Az érzékelő még a térképen kívül, akár 50 m-es távolságban is képes volt lokalizálni magát a radartérképen, valamint olyan ritkás helyszíneken, ahol a tereptárgyak akár 300 m-re is voltak. Az 1. ábra a Navtech radar segítségével szolgáltatott nagy felbontású adatokat mutatja.