Radar tabanlı konum belirleme - BAE Systems ile - Thames Nehri, Londra Birleşik Krallık (2021)
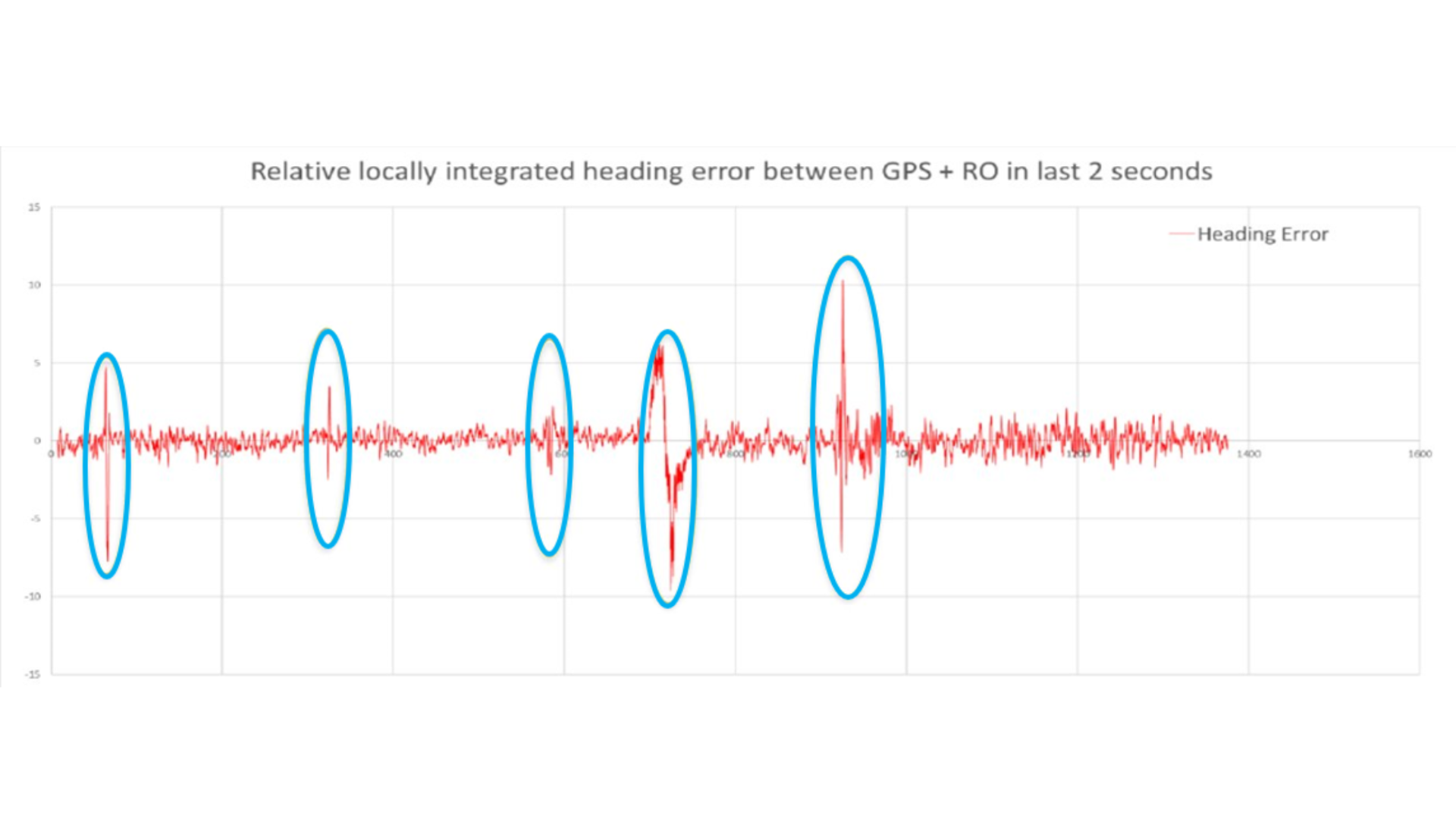
BAE ve Navtech Radar BAE’nin veri toplama gemisinden Thames Nehri boyunca toplanan verileri kullanarak lokalizasyonu denemek için işbirliği yaptı. Sistem performansı, düzeltmelerle birlikte gemideki bir GNSS ile karşılaştırıldı ve köprülerin altı ve keskin dönüşler gibi GNSS’nin reddedildiği alanlara özellikle dikkat edildi.
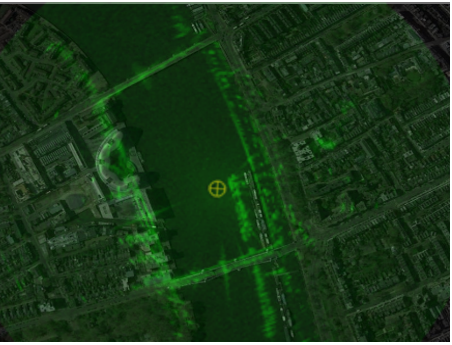
BAE Systems, deneme yeri olarak Thames Nehri’nin 25,8 mil uzunluğundaki bölümünü seçti; bu bölüm 18 köprü ve iki keskin dönüş içeriyordu. Ortamın bir haritasını oluşturmak için güzergahın bir tam geçişi yapıldı, ardından buna karşı yerelleştirmek için ikinci bir geçiş tamamlandı.
Radar çözümü harita oluşturmak için yaklaşık 10MB/km alan kullanmaktadır, dolayısıyla Thames Nehri’nin tamamını haritalamak için 3,5 GB’den daha az alana ihtiyaç duyulacaktır. Deneme sonuçları, çözümün yolculuk boyunca ortalama 10,3 cm doğrulukla başarılı bir lokalizasyon sağladığını göstermiştir. Sensör, sensör tabanlı lokalizasyon teknikleri için tipik olarak zorlu olan alanlar da dahil olmak üzere yolculuğun tüm uzunluğunu lokalize etti.
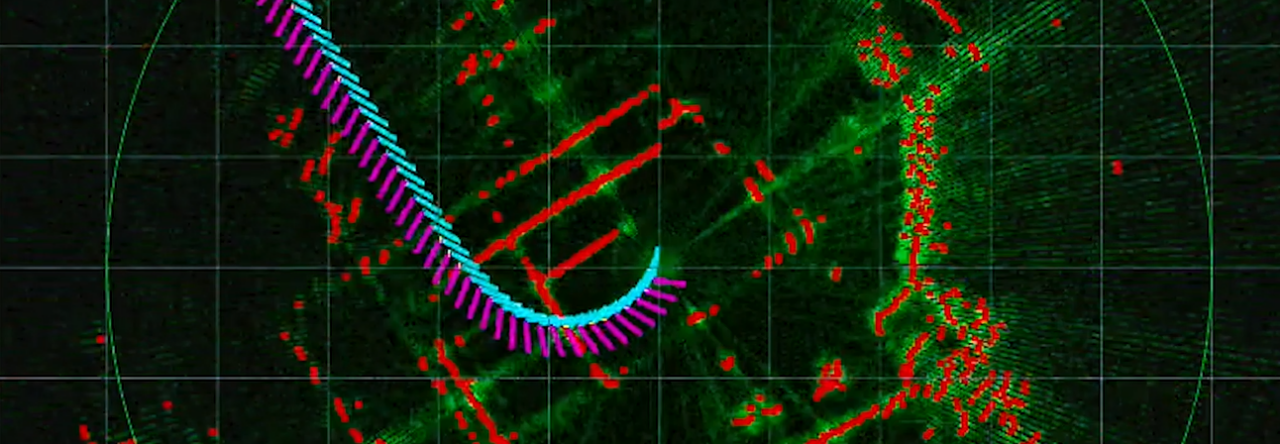
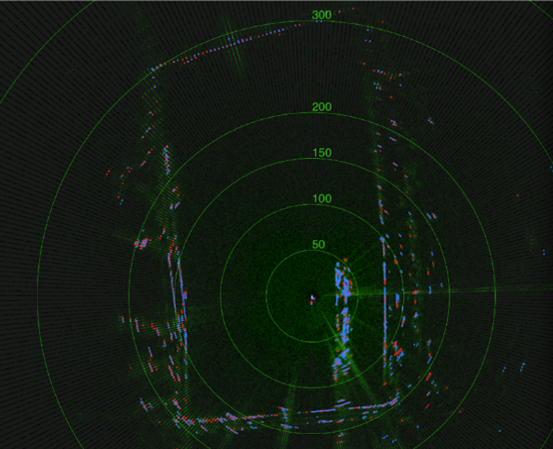
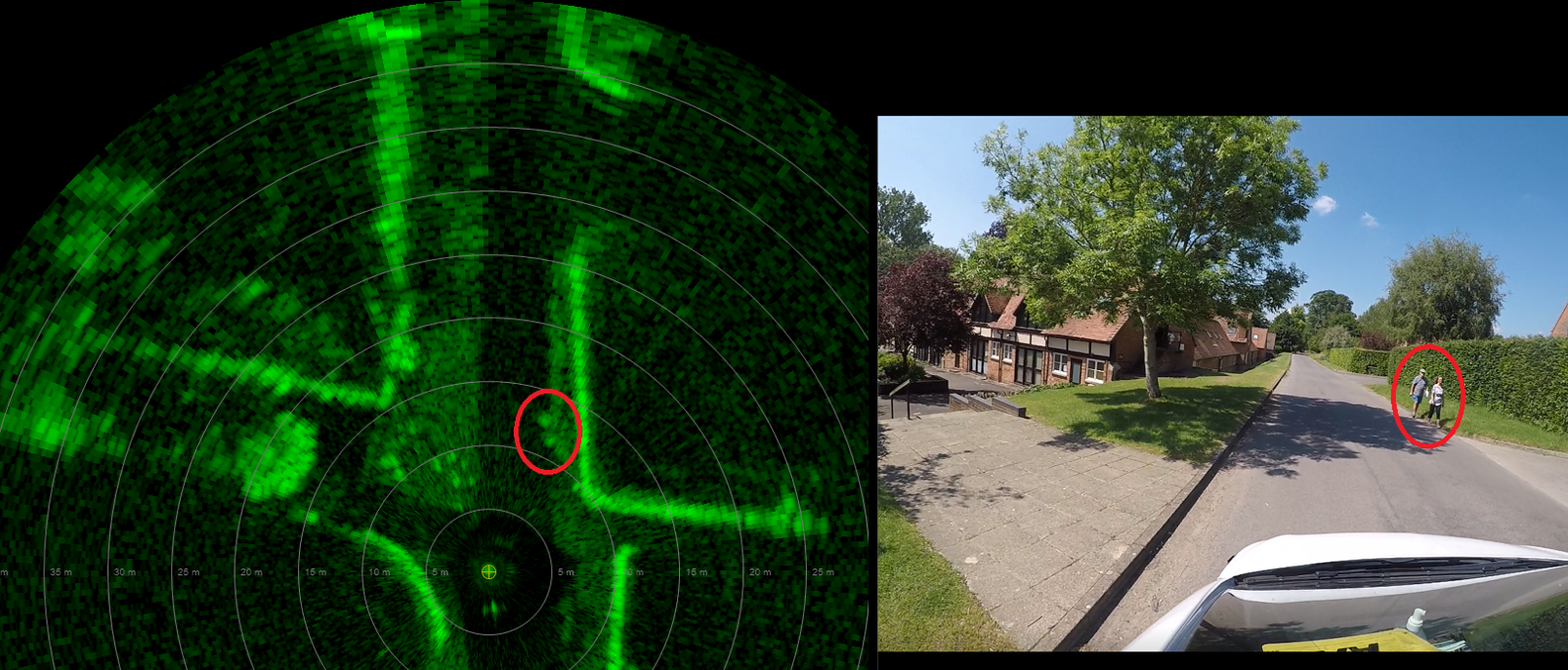
Harita dışındayken bile, 50 m’ye kadar olan mesafelerde, sensör radar haritasında ve yer işaretlerinin 300 m’ye kadar uzakta olduğu seyrek özellikli yerlerde kendini konumlandırabilir. Şekil 1, Navtech radarı kullanılarak sağlanan yüksek çözünürlüklü verileri göstermektedir.