Problems We Solve
Security Solutions
Learn more about the problems our radar for security solutions solve.
Intelligent Transport SystemsLearn more about the problems our radar for Intelligent Transport Systems (ITS) solve.
Industrial Automation SolutionsLearn more about the problems our radar for industrial automation solutions solve.
Don’t see your problem listed?
Contact Us
Problems We Solve
Don’t see your problem listed?
Contact Us
Problems We Solve
Don’t see your problem listed?
Contact Us
Problems We Solve
Markets
Security Solutions
Learn more about the markets our radar for security solutions serve.
Intelligent Transport SystemsLearn more about the markets our radar for Intelligent Transport Systems (ITS) serve.
Industrial Automation SolutionsLearn more about the markets our radar for industrial automation solutions serve.
Don’t see your problem listed?
Contact Us
Markets
Don’t see your problem listed?
Contact Us
Markets
Radar Solutions
Security Solutions
For complex, active sites where legitimate and illegitimate activity may occur at the same time.
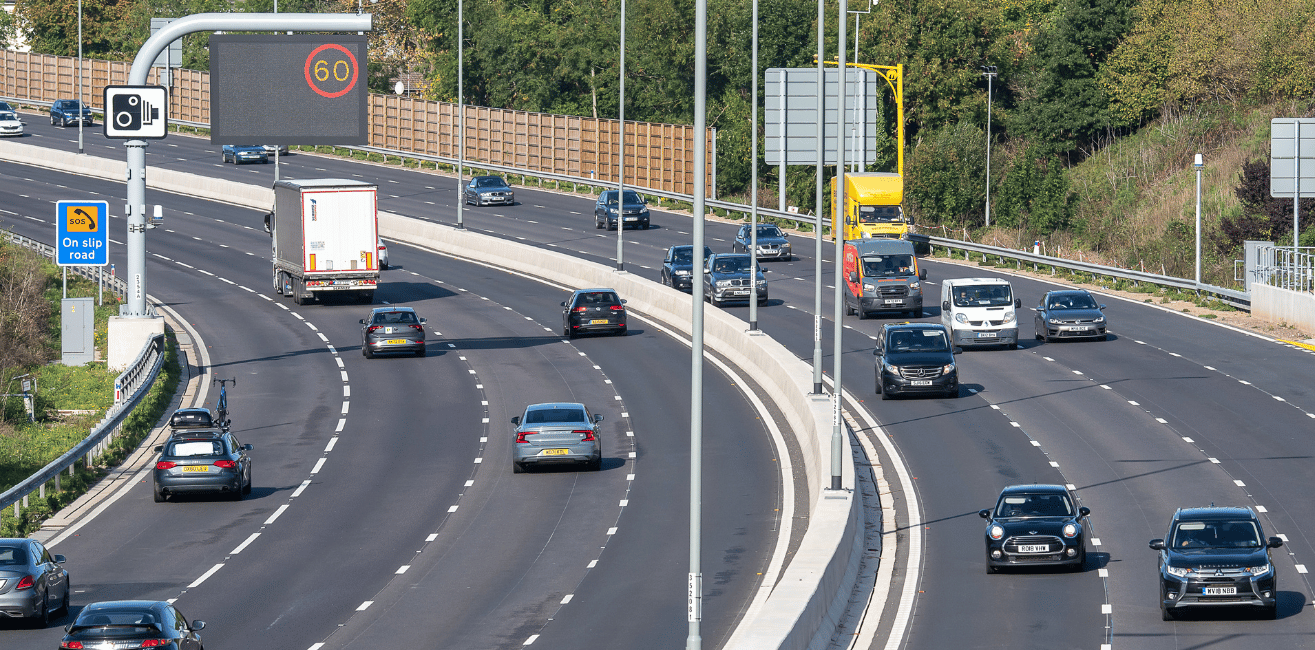
Intelligent Transport Systems360° radar solution for the Intelligent Transport Systems (ITS) market.
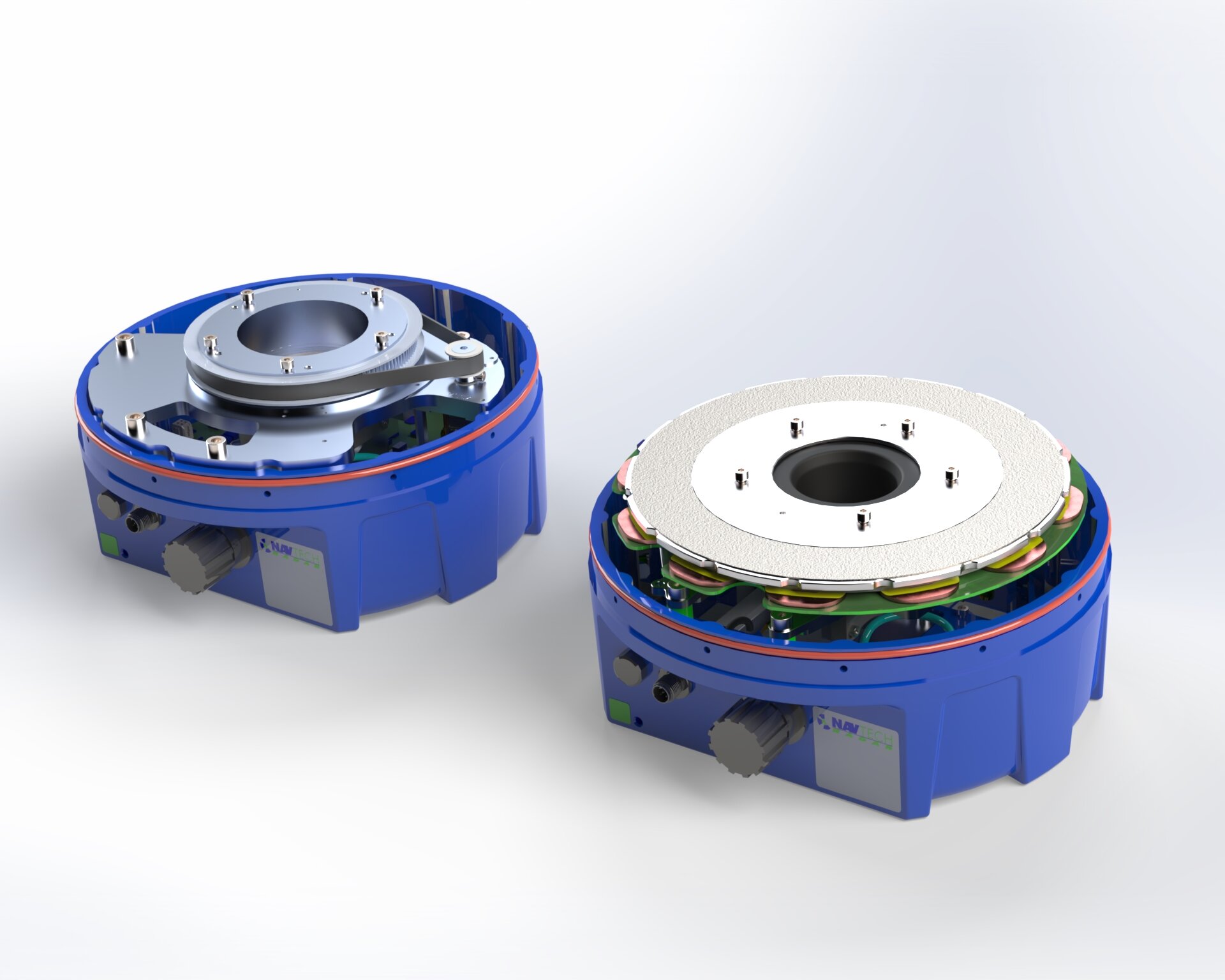
Industrial Automation SolutionsIntegrate our sensors with your industrial automation system to unlock complete performance in any condition.
Don’t see your problem listed?
Contact Us
Radar Solutions
Don’t see your problem listed?
Contact Us
Radar Solutions
Don’t see your problem listed?
Contact Us
Radar Solutions
Projects
Why Navtech?
Security Solutions
Intelligent Transport Systems
Industrial Automation Solutions
Projects
Filtered by Market
Projects
Filtered by Market
Filtered by Problems We Solve